当齿轮系运转时,如果组成该齿轮系的齿轮中至少有一个齿轮的几何轴线位置不固定,而绕着其他齿轮的几何轴线旋转,即在该齿轮系中,至少具有一个作行星运动的齿轮。这样的齿轮传动称为行星传动。
行星齿轮传动特点
行星齿轮传动的优点:
(1)体积小,质量小;
(2)结构紧凑,承载能力大;
(3)
传动效率高;
(4)传动比大;
(5)运动平稳、抗冲击和振动的能力较强。
行星齿轮传动的缺点:
(1)材料优质、结构复杂;
(2)制造和安装困难;
(3)造价高。
行星机构构成
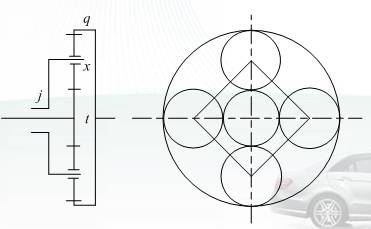
最简单的行星机构由太阳轮t、齿圈q、行星架j和行星轮x组成
单排行星齿轮机构工作原理
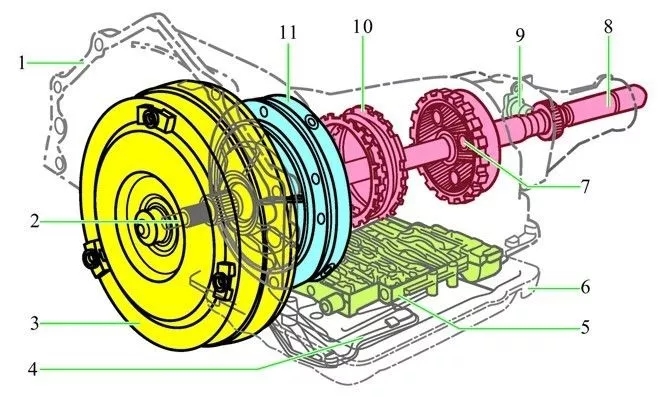
简单(单排)的行星齿轮机构是变速机构的基础,通常自动变速器的变速机构都由两排或三排以上行星齿轮机构组成。简单行星齿轮机构包括一个太阳轮、若干个行星齿轮和一个齿轮圈,其中行星齿轮由行星架的固定轴支承,允许行星轮在支承轴上转动。行星齿轮和相邻的太阳轮、齿圈总是处于常啮合状态,通常都采用斜齿轮以提高工作的平稳性(如图9.l所示)。
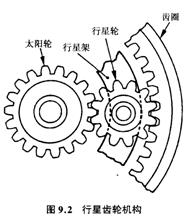
图9.2表示了简单行星齿轮机构,位于行星齿轮机构中心的是太阳轮,太阳轮和行星轮常啮合,两个外齿轮啮合旋转方向相反。正如太阳位于太阳系的中心一样,太阳轮也因其位置而得名。行星轮除了可以绕行星架支承轴旋转外,在有些工况下,还会在行星架的带动下,围绕太阳轮的中心轴线旋转,这就像地球的自转和绕着太阳的公转一样,当出现这种情况时,就称为行星齿轮机构作用的传动方式。在整个行星齿轮机构中,如行星轮的自转存在,而行星架则固定不动,这种方式类似平行轴式的传动称为定轴传动。齿圈是内齿轮,它和行星轮常啮合,是内齿和外齿轮啮合,两者间旋转方向相。行星齿轮的个数取决于变速器的设计负荷,通常有三个或四个,个数愈多承担负荷愈大。
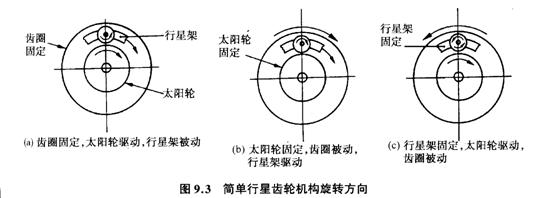
简单的行星齿轮机构通常称为三构件机构,三个构件分别指太阳轮、行星架和齿圈。这三构件如果要确定相互间的运动关系,一般情况下首先需要固定其中的一个构件,然后确定谁是主动件,并确定主动件的转速和旋转方向,结果被动件的转速、旋转方向就确定了。下面分别讨论三种情况。
①见图9.3(a),齿圈固定,太阳轮为主动件且顺时针转动,而行星架则为被动件。太阳轮顺时针转动,则行星轮应为逆时针转动,但由于齿圈固定,因此行星轮要逆时针转动只有行星架同时实现顺时针转动方可实现,结果行星轮不仅存在逆时针自转,并且在行星架的带动下,绕太阳轮中心轴线顺时针公转。在这种状态下,就出现了行星齿轮机构作用的传动方式,而且被动件行星架的旋转方向与主动件同方向。在这里,太阳轮是主动件而且是小齿轮,被动件行星架没有具体齿数的传动关系,因此定义行星架的当量齿数等于太阳轮和齿圈齿数之和。这样,太阳轮带动行星架转动仍属于小齿轮带动最大的齿轮,是一种减速运动且有最大的传动比。
②见图9.3(b),太阳轮固定,行星架为主动件且顺时针转动,齿圈为被动件。当行星架顺时转动时,势必造成行星轮的顺时针转动,结果行星轮带动齿圈顺时针转动。在这里,主动件行星架的旋转方向和被动件齿圈相同。由于行星架是一个当量齿数最大齿轮,因此被动的齿圈以增速的方式输出,两者间传动比小于1。
③见图9.3(C),行星架固定,太阳轮为主动件且顺时针转动,而齿圈则作为被动件。由于行星架被固定,则机构就属于定轴传动,太阳轮顺时针转动,行星轮则逆时针转动,而行星轮又带齿圈同方向转动,结果齿圈的旋转方向和太阳轮相反。在定轴传动中,行星轮起了过渡轮的作用,改变了被动件齿圈的旋向。
下面讨论齿圈的输出是增速或减速的问题。从结构图上已经可以看到,太阳轮的齿数小于齿圈的齿数,属于小齿轮带动大齿轮的传动关系,因此齿圈显然是减速状态,即两者间的传的比大于l。注意,由于行星轮是过渡轮,传动比的大小与行星轮的齿数多少无关。
通过以上三种传动关系的分析,可以把简单行星齿轮机构的运动特征归纳成下列几点。
①两个外齿轮相互啮合时,其转动方向相反。
②一个外齿轮与一个内齿轮相啮合时,其转动方向相同。
③小齿轮驱动大齿轮时,输出扭矩增大而输出转速降低。
④大齿轮驱动小齿轮时,输出扭矩减小而输出转速提高。
⑤若行星架作为被动件,则它的旋转方向和主动件同向。
⑥若行量架作为主动件,则被动件的旋转方向和它同向。
⑦在简单行星齿轮机构中,太阳轮齿数最少,行星架的当量齿数最多.而齿圈齿数则介于中间。(注:行星架的当量齿数=太阳轮齿数十齿圈齿数。)
⑧若行星齿轮机构中的任意两个元件同速同方向旋转,则第三元件的转速和方向必然与前两者相同,即机构锁止,成为直接档。(这是一个十分重要的特征,尽管上述的例子没有涉及。)
|
|
固定件
|
主动件
|
从动件
|
传动比
|
转速
|
旋转方向
|
扭矩
|
相当传动挡
|
|
1
|
环齿圈
|
太阳轮
|
行星架
|
i1
|
下降
|
相同
|
增大
|
一挡
|
|
2
|
行星架
|
太阳轮
|
i1
|
上升
|
相同
|
减小
|
|
|
3
|
太阳轮
|
环齿园
|
行星架
|
i1
|
下降
|
相同
|
增大
|
二挡
|
|
4
|
行星架
|
环齿园
|
i1
|
上升
|
相同
|
减小
|
超速档
|
|
5
|
行星架
|
太阳轮
|
环齿园
|
i1
|
下降
|
相反
|
增大
|
倒档
|
|
6
|
环齿园
|
太阳轮
|
i1
|
上升
|
相反
|
减小
|
|
|
7
|
无
|
任意二
|
另一
|
i=1
|
相等
|
相同
|
相等
|
直接挡(三挡)
|
|
8
|
所有元件不受约束
|
|
|
|
|
空挡
|
通过前面行星齿轮机构的
工作原理介绍,可以知道行星齿轮机构若要实现传动比的例或者输出轴旋转方向的变化,通常采用的措施是改变主、被动件的关系,另一个措施是改变B定的元件,通过不同的组合方式可获得不同的传动比和旋转方向。在表9.1中清楚反映列种关系。使传动比和旋转方向产生变化的元件称为
变速执行元件,它们分别是多片离合器、制动箍带和伺服油缸、单向离合器。其中前两种需要液压控制,而单向离合器是机械结构,固定旋转件再仅仅取决于旋转五向。
1、制动箍带和伺服油缸
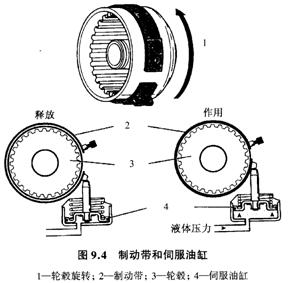
行星齿轮机构中的三大构件,都允许自由旋转,但为了要实现某一档位的变换,需要把其中的一件加以固定,承担该任务的就是制动箍带和伺服油缸,两者是配套使用的,有时又称两者为制动器。图9.4所示反映了该装置的工作原理。
制动带是一种围绕在制动鼓外面可收拢的制动组件。每个制动鼓与行星齿轮机构的某一元件连成整体,锁止制动鼓
所谓制动鼓就是
鼓式刹车系统的一部份,刹车时,活塞对两对半月型的刹车蹄片施加压力,使其贴紧鼓室内壁,从而产生摩擦来停止车轮的旋转。
就是固定行星齿轮机构的一个构件。制动带是衬有半金属或有机摩擦
材料的简单挠性
金属带。当伺服油缸给制动带作用力时,制动带箍紧制动鼓,行星
齿轮机构某一构件的旋转也随之被固定。伺服油缸是制动带的施力装置,当液压作用在伺服活塞上时使活塞压缩回位弹簧而移动,并通过机械的联动装置作用在制动带上。为了释放制动带,作用在伺服活塞上的液压油通过控制阀改变液体的流动方向,和回油相通,伺服活塞在回位弹簧力的作用下回到初始位置,制动带释放。
制动带的收拢作用力方向,可以设计成和制动鼓同一旋转方向,也可以设置成相反。假若作用力方向和制动鼓旋转同一方向,则制动鼓的旋转使制动带锁正力增大,好比车轮制动器中的“领蹄”,而使伺服油缸作用油压减小。假若作用力和旋转方向相反,就好比是“从蹄”,锁止力减弱,则伺服油缸的作用力需要增大。
伺服油缸是产生制动带作用力的装置,油缸作用面积愈大,作用油压愈高,所产生作用力愈大。图9.4反映的是一种广泛采用的伺服油缸,油缸中仅有一个活塞,而且油压仅作用在活塞的一侧,称为单向作用伺服油缸。图9.6所示是另一种伺服油缸,虽然活塞仅有一个,但活塞两侧都可作用油压,而且活塞左侧的作用面积小于右侧,这是一种差动油缸,又称为双向作用伺服油缸。
2、多片离合器
多片离合器的功能之一是进行动力切换,变速器的输入
动力来自变矩器涡轮轴,为了实现档位状态的变化,必须要把输入动力接通到行星齿轮机构的某一主动件上,比如把动力接通到太阳轮,但在另一档位又必须把同一输入动力接通至行星架。架通输入动力和机构中某一构件的桥梁就是多片离合器,通过多片离合器,既可以把传动路线导通,也可将其断开。
多片离合器的功能之二是固定行星齿轮机构的某一构件。在这种情况又把它称为制动器。在日本丰田公司制造的自动变速器中,其行星齿轮机构的变速执行元件中没有制动带,取而代之的是多片离合器。把多片离合器的一端和机构中的某一构件连接,而另外一端则和变速器壳体连接。
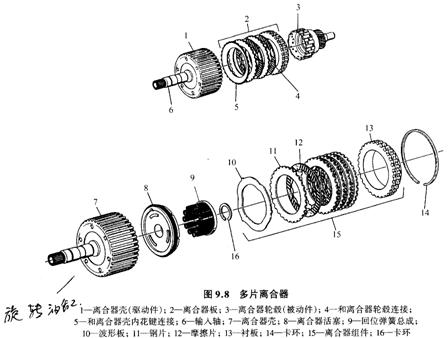
图9.8示意的是多片离合器组件,它包括一些带有摩擦材料的盘片和一些钢制盘片,摩擦片和钢片交替地安装在离合器鼓内。摩擦片的工作面上有粗糙的摩擦材料,而钢片表面则光滑,没有摩擦材料。油压通过离合器鼓内的活塞作用,把摩擦片和钢片紧压在一起,使离合器处于结合状态。如果
油压被消除,则
回位弹簧使活塞回位,而使离合器处于分离状态。通常两组片子中摩擦片的内缘有内花键,而钢片的外缘则有外花键,钢片的外花键和主的离合器鼓的内花键相配合,摩擦片的内花键则和从动轴的外花键相配合,当离合器接合时,主动件通过多片离合器把动力传递给被动件。当油压作用在活塞上时每一组片子的正压力都是相等的,片子数愈多、油压愈高,离合器可
传递负荷的能力也愈大。
3、单向和超越式离合器
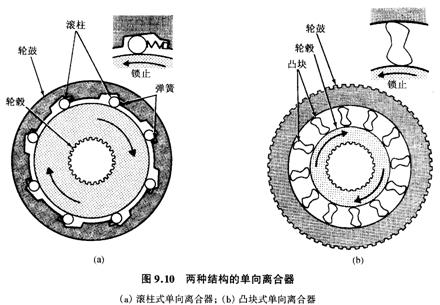
自动变速器中单向离合器是一种固定装置,它的功能和制动带相似。制动带能够在两个方向都能锁止制动鼓旋转,而单向离合器只能在广个方向锁止,而在另一方向则能自由转动。单向离合器的内外圈中有一件是直接和壳体固定的,而另外一件则和行星齿轮机构的某一构件连接。在自动变速器中常用的单向离合器有两种不同的型式:滚柱式和凸块式,见图9.10。
滚柱式单向离合器利用弹簧把滚柱固定在离合器内外座圈之间适当位置。外座圈的内表面有若干个凸轮状缺口,滚柱在弹簧力作用下,使其介于内座圈和缺口表面之间,当某一座圈固定,而另一座圈以一定方向转动时,滚柱楔紧在缺口滚道的狭窄端,则旋转座圈也锁止。当该座圈朝相反方向旋转时,滚柱朝缺口滚道较宽端运动,滚柱和缺口滚道无楔紧趋势,该座圈能自由转动。凸块式单向离合器包括内外座圈和介于座圈间的8字形的金属凸块。当其中一个座圈固定,而另一座圈往某一方向旋转时,其结果使8字形凸块竖起,楔紧内外座圈表面,则旋转座圈锁止。当该座圈以相反方向旋转,使凸块倒下,没有楔紧内外座表面的趋势,那么该座圈可以自由转动。
超越式离合器
(超越离合器就是超越分离,被动轮有负载时,离合器接合,一旦负载变为动能,可马上将动力分离。如在摩托车上,加油时,车轮有负载,动力
接合,产生驱动力。速度上去了,减小油门时,就分离动力,使车辆脱档滑行,省得让车轮
驱动发动机,产生
发动机制动。起到节油效果。)
尽管结构型式和单向离合器完全相同,但它的作用方式有较大区别,超越式离合器的内外圈分别和运动的部件相连,它的所谓“锁止”或“超越”不仅取决于内外圈的旋转方向,而且取决于内外圈的相对速度。超越式离合器一般安装位置是介于输入动力和行星齿轮机构某j构件之间,其功能类似于多片离合器,但多片离合器的接合与释放借助于活塞上的作用油压,而超越式离合器是纯机械控制,图9.11所示是超越式离合器在内外座圈不同速度下离合器的锁止和超越状态。当内座圈转速大于外座圈时,则离合器超越,即内外座圈各自按原有转速旋转,相互间无干扰。当内座圈转速小于外座圈时,则离合器锁止。注意上述判定条件都是图示的结构所决定的。假若8字凸块倒向另外一方向(即把离合器水平旋转180度),上述的结果正好都相反
。
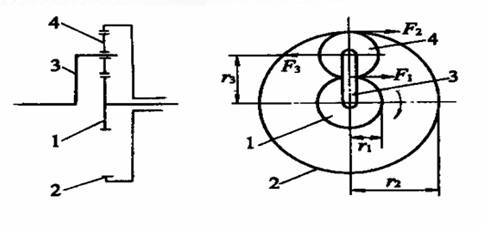
行星轮受力分析
行星轮所受到的作用力 :
作用于太阳轮1上的力矩

作用于齿圈2上的力矩

作用于行星架3上的力矩


令齿圈与太阳轮的齿数比为а,则
因而又

式中:r1、r2分别为太阳轮和齿圈的节圆半径;r3为行星轮与太阳轮的中心距。
由行星轮4的力平衡条件可得


因此,太阳轮、齿圈和行星架上的力矩分别为:
根据能量守恒定率,三个元件上输入和输出的
功率的代数和应等于零,即式中:

ω1、ω2、ω3分别为太阳轮、齿圈和行星架的角速度。
整理公式,即可得到表示单排行星齿轮机构一般运动规律的特征方程式:

若以转速代替角速度,则上式可写成单排行星齿轮机构一般运动规律的特性方程式。

由上式可以看出,由于单排行星齿轮机构具有两个自由度,在太阳轮、齿圈和行星架这三个基本的构件中,任选两个分别作为主动件和从动件,而使另一元件固定不动(即使该元件转速为0),或使其运动受一定的约束(即该元件的转速为某定值),则机构只有一个自由度,整个轮系以一定的传动比传递动力。