电动转向助力控制介绍
传感器:转向角度传感器G85,转向角速度方向(左、右)
转向力矩传感器,车速及发动机转速。
转向机控制模块:接收信号计算出结果发出指令。
CAN
数据总线:信号传输。
转向电机执行控制模块发出指令。
电动助力方向跑偏产生原因
定位数据
分析:
四轮定位数据:
主销内倾、后倾、车轮外倾、前束。
影响方向跑偏定位数据:后倾、车轮外倾、
前束。
定位调整操作不当,将严重影响方向跑偏。
有轻微方向跑偏现象:轮胎换位。
直线行驶时,方向跑偏。
电动助力转向方向跑偏处理方案
确认方向跑偏症状:
试车确认在良好路面状况下直线行驶,检查方向跑偏状况。直线行驶车速控制在50~60km/h、70~80km/h、80~90km/h。
试车方式:
① 在上述各车速区间进行试车,匀速行驶时,测试方向实际状况。
② 在上述各
车速区间段进行急加油门,测试方向实际状况。
在低速50~60km/h匀速行驶时,方向有明显的跑偏。确认
底盘是否被碰撞过及四轮定位数据状态。如果方向明显的有跑偏现象(用VAS6150对
转向系统G85做一次基本设定),设定成功后再试车。
在低速时方向正常,中高速时方向跑偏明显,用四轮定位仪调整定位数据。
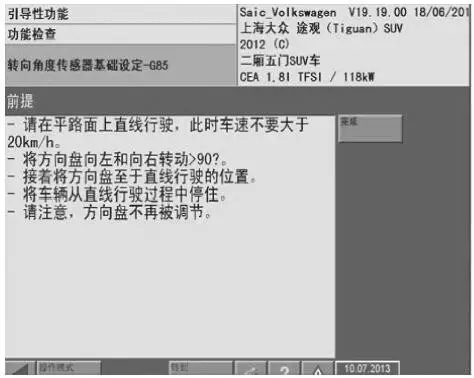
用
VAS6150 在引导型功能作G85转向角度
传感器基本设定,见下图。
转向角度传感器基本设定
直线行驶时,方向盘不正。
有轻微的
方向盘不正现象,通过调整方向盘可以解决。
通过调整方向盘不能解决的,需确定定位数据状态。
避免凭维修经验调整左右横拉杆(前束)以修整方向盘。
正确的定位调整方法是方向盘固定保持架的正确安装。