CAN-BUS系统
07-06
什么是CAN-BUS
CAN-BUS是汽车神经系统实现数字化,是一个智能化网络计算平台,是汽车电子技术发展的一个里程碑。https://www.qcwxjs.com
汽车网络贯穿整车的每个单元即控制系统、信息系统、驾驶系统和传感执行系统,通过CAN-BUS进行互联。实现数据的高实时性;高速的CAN-BUS每毫秒内可以传送32 字节的有效数据,每个信号接收者从总线上自行读取其所需的数据。具有极强的抗干扰能力及纠错能力,最早被美国军方广泛应用于导弹、飞机和坦克电子系统的通讯联络上。
总线(CAN-BUS)系统
总线系统是一种连接不同的装置(如电子控制单元)并利用编码信号传递数据的网络系统。由于编码技术的应用,能够以最少的线路连接所有的装置。其它使用总线系统的原因如下:较少的线路与装置能减轻重量与节省成本;使系统有更高的可靠度;复杂的功能较容易执行;采用通用传感器,达到数据共享的目的。
Can-Bus总线技术是“控制器局域网总线技术(Controller Area Network-BUS)”的简称,在汽车上,这种总线网络用于车上各种传感器数据的传递,实现数据共享。
传统的汽车在机舱和车身内需要埋设大量线束以传递传感器采集的信号,而Can-Bus总线技术的应用可以大量减少车体内线束的数量,线束的减少则降低了故障发生的可能性。
例
现今汽车与传统车辆的差异
减少这些多余的缆线与不必要的接头和多余的传感器,进而降低其故障产生的可能。
总线(CAN-BUS)系统特性
优先权问题。如自动换挡要求减油门,巡航控制同时要求增油,而ASR则要求减油门以维持驱动轴的低扭矩。根据重要程度,则应确定换挡优先,协议能定义各个子系统的优先权顺序。
灵活性问题。因为各个子系统都是不同类型的控制系统,网络应具备将各个子系统有机地融合在一起的能力。
可扩展性。即需要增加新的子系统时,不需要对基本系统作修改。
独立性。每个子系统都可以独立工作,某个子系统出现故障时并不影响其他系统的正工作。
为满足不同控制系统的要求,应具有高的数据传输速率带宽,具有通用的故障诊断接口诊断协议。https://www.qcwxjs.com
车辆状态共享。如发动机转速、车速、轮速等数据必须各子系统共享,数据的传输及刷新时间取决于各个子系统的特性,并由此决定优先权。
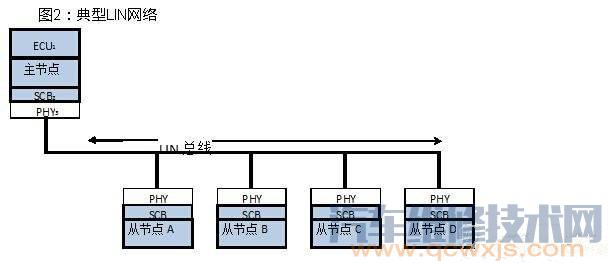
网络配置
所谓网络是连接数个装置并以数字信号交换信息的系统。常见的网络配置方式如下图:
信号种类
数据框架一定要能辨别每笔讯息!必须包含如起点、地址、讯息、优先级、终点等信息。
网络沟通
所有网络的共通问题就是要避免在同一个时间传递数笔数据。
可行的方法是每个ECU都只能使用被允许的某特定的时间来发送讯息. 还有比较好的方式吗?
网络通讯方式
同步化
在发送与接收端讯息同步化的过程中,必须去避免因为时间延迟造成的错误。
HTTPS://www.qcwxjs.com/
同步化是利用缩短位时间。但如果在正常的位时间结束前发生了变化,同步化有办法去避免接收错误的讯息吗?
错误防范
【同位检查(Parity Check)】
【加总检查(Sum Check)】
【循环多余检查(CyclicRedundancy Check, CRC)】
Mitsubishi 车内之BUS系统
SWS(Smart Wiring System)系統
利用单一路线传输多重讯号,可減少车身线束、降低重量并简化线路及车辆结构。
ETACS-ECU、前ECU、柱开关(內含ECU)、电动窗主开关等,共同結合成一共用传输回路,传送或接收多重讯号。
SWS信号
系统结构
CAN的高低电位差不会因噪声的干扰而变化
CAN信号
CAN资料传输
CAN网络上任意一个节点可在任何时候向网络上的其他节点发送信息而不分主从。网络上的节点可分为不通优先级。
当两个节点(即子系统)同时向网络上传递信息时,优先级低的停止数据发送,而优先级高的节点可不受影响地继续传送数据。具有点对点、一点对多点及全局广播接收传送数据的功能。
连接管理
主要对节点之间连接的建立和关闭,数据的传送进行管理。
5种帧结构:发送请求帧、发送清除帧、结束应答帧、连接失败帧以及用来全局接收的广播帧。https://www.qcwxjs.com
节点之间的连接通过一个节点向目的地址发送一个发送请求帧而建立。在接收发送请求帧以后,节点如果有足够的空间来接收数据并且数据有效,则发送一个发送清除帧,开始数据的传送。如果存储空间不够或者数据无效等原因,节点需要拒绝连接,则发送连接失败帧,连接关闭。如果数据接收全部完成。则节点发送一个结束应答帧,连接关闭。https://www.qcwxjs.com
CAN资料框架
不同的CAN资料框架
此两种配置的主要差异在识别信号(优先序)的数量
线路与配置
冲裁
位填充(Bit-Stuffing)
诊断状态数据
诊断状态数据支持。提供一系列的数据格式。包括读取出错数据、清除错误数据、监测通信参数、获取节点的配置以及其他的一些信息。
自我诊断
【Time out】
【Bus-OFF】
【Failure information】
线束修护(1)
不可只挑出一条电线修护!
最大的非绞长度为10公分。
线束修护(2)
护时不可改变连接点节点必须保持连接在主要BUS上。
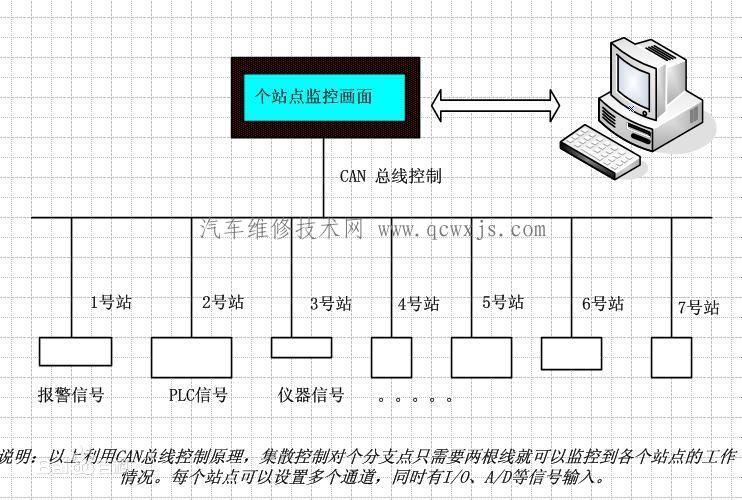
未来的配置图
未来的CAN-BUS控制技术
例
使用电控技术的优点很多,比如使用电控制动无需制动液,保护生态,减少维护;质量轻;性能高(制动响应快);制动磨损最小(向轮胎施力更均匀);安装测试更简单快捷(模块结构);更稳固的电子接口;隔板间无机械联系;简单布置就能增加电子控制功能;踏板特性一致;比液压系统的元件更少等。
( 汽 车维修技术网 https://www.qcwxjs.com/)
- 前文: 卡罗拉空调滤芯怎么换
- 后文: 发动机漏油从哪看出来