汽车车载网络的种类分类和应用
05-17
对整个汽车车载网络并没有一个很清晰的思路,所以特意寻找各方面的资料,对汽车网络的分类及发展趋势进行一下了解。
从目前的发展和使用情况来看,A类网的主要总线是TTP/A(Time Triggered Protocol/A)和LIN(Local Interconnect Network)
(1)TTP/A协议最初由维也纳工业大学制定,为时间触发类型的网络协议,主要应用于集成了智能变换器的实时现场总线。它具有标准UARTUART(Universal Asynchronous Receiver Transmitter:通用异步收发器)n,能自动识别加入总线的主节点与从节点,节点在某段已知的时间内触发通信但不具备内部容错功能。
由于LIN价格低廉,因此它可将MCU嵌入到车身零部件中,使其成为具备网络功能智能零部件(Smart Parts)从而进一步减少线束、降低成本。LIN网络已经广泛地被世界上的大多数汽车公司以及零配件厂商所接受,有望成为事实上的A类网络标准。
从目前B类网络的使用情况来看主要有两种:低速CAN和VAN。
(1)VAN标准是ISO于1994年6月推出的。它基于ISO11519-3,主要为法国汽车公司所用。但目前就动力与传动系统而言,甚至在法国也集中在CAN总线上。
(2)CAN是德国Bosch公司从20世纪80年代初,为解决现代汽车中众多的控制与测试仪器之间的数据交换问题而开发的一种串行数据通信协议。它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1Mbps。1991年首次在奔驰S系列汽车中实现。同年,Bosch公司正式颁布了CAN技术规范,版本2.0。1993年11月,ISO正式颁布了国际标准ISO11898,为CAN的标准化、规范化铺平了道路。此后,越来越多的北美和日本汽车公司也开始采用CAN网络。1994年,美国汽车工程师协会卡车和巴士控制与通信子协会选择CAN作为SAE j1939标准的基础。低速CAN具有许多容错功能,一般用在车身电子控制中;而高速CAN则大多用在汽车底盘和发动机的电子控制中。
CAN总线凭借其突出的可靠性、实时性和灵活性已从众多总线中突显出来,成为世界接受的B类总线的主流协议。
OBD-II第二代随车电脑诊断系统,由美国汽车工程学会1994年提出。1994年以来,美、日、欧一些主要汽车生产厂为了维修方便逐渐使用OBD-II随车诊断系统。这一系统集故障自诊断系统软硬件结构、故障代码、通信方式系统、自检测试模式为一体, 具有监视发动机微机和排放系统部件的能力。
2004年,美国GM、Ford、DC三大汽车公司对乘用车采用基于CAN的J2480诊断系统通信标准。在欧洲, 从2000年开始,欧洲汽车厂商就已经能够开始使用一种基于CAN总线的诊断系统通信标准ISO15765,它满足E-OBD的系统要求。
目前,除了CAN网络,LIN协议也已经成为汽车诊断的总线标准。
目前,汽车的故障诊断主要是通过一种专用的诊断通信系统来形成一套较为独立的诊断网络,ISO9141和ISO14230就是这类技术上较为成熟的诊断标准。而ISO15765适用于将车用诊断系统在CAN总线上加以实现的场合,从而适应了现代汽车网络总线系统的发展趋势。ISO15765的网络服务符合基于CAN的车用网络系统的要求,是遵照ISO14230-3及ISO15031-5中有关诊断服务的内容来制定的,因此,ISO15765对于ISO14230应用层的服务和参数完全兼容,但并不限于只用在这些国际标准所规定的场合,因而有广泛的应用前景。
诊断协议标准使用情况:
(1)MOST网络
MOST网络是由德国Oasis Silicon System公司开发的。MOST技术针对塑料光纤媒体而优化,采用环行拓扑机构,在器件层提供高度可靠性和可扩展性。它可以传送同步数据(音频信号、视频信号等流动型数据)、非同步数据(访问网络及访问数据库等的数据包)和控制数据(控制报文及控制整个网络的数据)。MOST得到包括BMW、Daimler Chrysler、Harman/Becker和Oasis公司的支持,已应用在多款车型上,如BMW7系列、Audi A-8、Mercedes E系列等。
(2)Blue tooth
随着蓝牙技术的发展,短距点对点通讯的蓝牙技术在汽车中寻求到了发展空间,其相对低廉的成本和简便的使用方法得到汽车业界的认同。蓝牙无线技术是一种用于移动设备和WAN/LAN接入点的低成本、低功耗的短距离射频技术。蓝牙标准描述了手机、计算机和PDA如何方便地实现彼此之间的互连,以及与家庭和商业电话和计算机设备的互连。蓝牙特殊兴趣组的成员包括AMIC、BMW、Daimler Chrysler、Ford、GM、Toyota和Volkswagen。
移动电话与车内媒体之间的信息交互成为蓝牙技术进入汽车的突破点,Johnson Controls公司的免提手机系统“Blue Connect”,允许司机在双手扶住方向盘的情况下,通过支持蓝牙功能的手机保持联系。Daimler-Chrysler推出Uconnect蓝牙免提电话系统中,蓝牙成为移动电话与车内媒体之间进行信息交互的手段,驾驶员通过安装在挡风玻璃上的麦克风和车内音响系统的扬声器与他人通话,将驾驶员的双手从橾作移动电话中解脱出来,从而保证了行车安全。
(3)ZigBee无线网络
ZigBee无线网络在汽车上应用的解决方案是针对蓝牙技术受车内电磁噪声影响的问题而提出。ZigBee可以工作在低于1GHz与2.45GHz的频带范围,传输速率为250kbps,主要应用范围包括工业控制、家庭自动化、消费类应用以及潜在的汽车应用。目前,ZigBee联盟发布了首批成功完成互操作性测试的四款平台。这些平台将用来测试未来数月内推出的ZigBee产品,为ZigBee在各领域的实际应用铺平道路。
6. 安全总线标准 (E类总线)
安全总线主要用于安全气囊系统,以连接速度计、安全传感器等装置,为被动安全提供保障。目前已有一些公司研制了相关的总线和协议,包括Delphi公司的SafetyBus和BMW公司的Byteflight。
Byteflight协议特点
Byteflight协议是由BMW、Motorola、Elmos、Infineon等公司共同开发的,试图用于安全保障系统。此协议基于灵活的时分多路TDMA协议、以10Mbps的速率传送数据,光纤可长达43m。其结构能够保证以一段固定的等待时间专门用于来自安全元件的高优先级信息,而允许低优先级信息使用其余的时段。这种决定性的措施对安全是至关重要的。
Byteflight不仅可用于安全气囊系统的网络通信,还可用于X-by-Wire系统的通信和控制。BMW公司在其2001年9月推出的BMW 7系列车型中,采用了一套名为ISIS的安全气囊控制系统,它是由14 个传感器构成的网络,利用Byteflight来连接和收集前座保护气囊、后座保护气囊以及膝部保护气囊等安全装置的信号。在紧急情况下,中央电脑能够更快、更准确地决定不同位置的安全气囊的施放范围与时机,发挥最佳的保护效果。
车载各类总线应用趋势图
目前存在多种汽车网络标准,其侧重的功能有所不同,为了方便研究和设计应用,美国汽车工程师协会(SAE :Society of Automotive Engineer)将汽车网络根据速率划分为 A,B,C,D,E五类。
1、A类车载网络标准
| 类别 | 用户 | 主要使用场合 | 备注 |
| UART | GM | 多种场合 | 正在淘汰 |
| 单线CAN | GM | 控制 | 车身低速 |
| E C | GM | 娱乐媒体 | 正在淘汰 |
| I2C | Renault | HVAC | 极少使用 |
| J1708/J1587/J1922 | TB | 多种场合 | 正在淘汰 |
| CCD | Chrysler | 传感器总成 | 正在淘汰 |
| ACP | Ford | 娱乐媒体 | 正在淘汰 |
| BEAN | Toyata | 控制 | 车身控制 |
| LIN | 许多公司 | 智能执行器/传感器 | 由LIN协会开发 |
| TTP/A | TTTech | 智能传感器 | 由维也纳理工大学开发 |
从目前的发展和使用情况来看,A类网的主要总线是TTP/A(Time Triggered Protocol/A)和LIN(Local Interconnect Network)
(1)TTP/A协议最初由维也纳工业大学制定,为时间触发类型的网络协议,主要应用于集成了智能变换器的实时现场总线。它具有标准UARTUART(Universal Asynchronous Receiver Transmitter:通用异步收发器)n,能自动识别加入总线的主节点与从节点,节点在某段已知的时间内触发通信但不具备内部容错功能。
(2)LIN是在1999年由欧洲汽车制造商Audi、BMW、DaimlerChrysler、Volvo、Volkswagen和VCT 公司以及Motorola公司组成的LIN协会,共同推出的用于汽车分布式电控系统的开放式的低成本串行通信标准,从2003年开始使用。
LIN是一种基于UART的数据格式、主从结构的单线12V的总线通信系统,主要用于智能传感器和执行器的串行通信。从硬件、软件以及电磁兼容性方面来看,LIN保证了网络节点的互换性,极大地提高了开发速度,同时保证了网络的可靠性。由于LIN价格低廉,因此它可将MCU嵌入到车身零部件中,使其成为具备网络功能智能零部件(Smart Parts)从而进一步减少线束、降低成本。LIN网络已经广泛地被世界上的大多数汽车公司以及零配件厂商所接受,有望成为事实上的A类网络标准。
2、B类车载网络标准
| 类别 | 用户 | 主要使用场合 | 备注 |
| 中速CAN | GM、Ford,DC | 多种场合 | 基于ISO11898,125kbps |
| 容错CAN | 欧洲 | 车身、动力系统控制 | 基于ISO11519 |
| J1850 | GM,Ford,Chrysler | 多种场合 | 主要应用于北美汽车公司,三家公司之间互不相同。目前已基本被CAN取代 |
| VAN | RenaultPSA | 车身控制 | 基于ISO11579-3,法国 |
从目前B类网络的使用情况来看主要有两种:低速CAN和VAN。
(1)VAN标准是ISO于1994年6月推出的。它基于ISO11519-3,主要为法国汽车公司所用。但目前就动力与传动系统而言,甚至在法国也集中在CAN总线上。
(2)CAN是德国Bosch公司从20世纪80年代初,为解决现代汽车中众多的控制与测试仪器之间的数据交换问题而开发的一种串行数据通信协议。它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1Mbps。1991年首次在奔驰S系列汽车中实现。同年,Bosch公司正式颁布了CAN技术规范,版本2.0。1993年11月,ISO正式颁布了国际标准ISO11898,为CAN的标准化、规范化铺平了道路。此后,越来越多的北美和日本汽车公司也开始采用CAN网络。1994年,美国汽车工程师协会卡车和巴士控制与通信子协会选择CAN作为SAE j1939标准的基础。低速CAN具有许多容错功能,一般用在车身电子控制中;而高速CAN则大多用在汽车底盘和发动机的电子控制中。
CAN总线凭借其突出的可靠性、实时性和灵活性已从众多总线中突显出来,成为世界接受的B类总线的主流协议。
3、C类车载网络标准
| 类别 | 用户 | 主要使用场合 | 备注 |
| J1969 | TB | 多种场合 | 在卡车大客车应用250kbps |
| 高速CAN | GM,欧洲 | 实时控制 | 基于ISO11898,500Kbps |
| TTP/C | TTTech | 实时控制 | 维也纳理工大学制定 |
| FlexRay | BMW,MotorolaDaimler Chrysler | 实时控制 | Flexray 联盟(GM 联合欧洲整车厂和零部件公司组成) |
C类标准主要用于与汽车安全相关及实时性要求比较高的地方,如动力系统, 所以其传输速率比较高,通常在125kbps - 1Mbps之间,必须支持实时的周期性参数传输。 目前,C类网络中的主要协议包括高速CAN(ISO11898-2)、正在发展中的TTP/C和FlexRay等协议。
(1)TTP/C协议由维也纳工业大学研究,基于TDMA的访问方式。
TTP/C是一个应用于分布式实时控制系统的完整的通信协议。 它能够支持多种容错策略, 提供容错的时间同步以及广泛的错误检测机制,同时还提供节点的恢复和再整合功能。其采用光纤传输的工程化样品速度将达到25Mbps。TTP /C 支持时间和事件触发的数据传输。TTP管理组织TTAGroup成员包括奥迪、SA、Renault、NEC、TTChip、Delphi等。
(2)FlexRay是BMW、Daimler Chrysler、Motorola和Philips等公司制定的功能强大的通信网络协议。
它是基于FTDMA的确定性访问方式,具有容错功能及确定的通信消息传输时间,同时支持事件触发与时间触发通信。具备高速率通信能力。FlexRay采用冗余备份的办法,对高速设备可以采用点对点方式与FlexRay总线控制器连接,构成星型结构,对低速网络可以采用类似CAN总线的方式连接。
(3)欧洲的汽车制造商基本上采用高速CAN总线标准ISO11898。
总线传输速率通常在125kbps-1Mbps 之间。据Strategy Analytics公司统计,2001年用在汽车上的CAN节点数目超过1亿个。然而,作为一种事件驱动型总线,CAN无法为下一代线控系统提供所需的容错功能或带宽,因为X-by-Wire系统实时性和可靠性要求都很高,必须采用时间触发的通信协议,如TTP/C或FlexRay等。
CAN协议仍为C类网络协议的主流,但随着汽车中引进X-by-Wire系统,TTP/C 和FlexRay将显示出优势。它们之间的竞争还要持续一段时间,在未来的线控系统中,到底哪一种标准更具有生命力尚难定论。4、诊断系统总线标准
故障诊断是现代汽车必不可少的一项功能、使用诊断系统的目的主要是为满足OBD-II(On Board Diagnose)、OBD-III或E-OBD(European-On Board Diagnose)标准。OBD-II第二代随车电脑诊断系统,由美国汽车工程学会1994年提出。1994年以来,美、日、欧一些主要汽车生产厂为了维修方便逐渐使用OBD-II随车诊断系统。这一系统集故障自诊断系统软硬件结构、故障代码、通信方式系统、自检测试模式为一体, 具有监视发动机微机和排放系统部件的能力。
2004年,美国GM、Ford、DC三大汽车公司对乘用车采用基于CAN的J2480诊断系统通信标准。在欧洲, 从2000年开始,欧洲汽车厂商就已经能够开始使用一种基于CAN总线的诊断系统通信标准ISO15765,它满足E-OBD的系统要求。
目前,除了CAN网络,LIN协议也已经成为汽车诊断的总线标准。
目前,汽车的故障诊断主要是通过一种专用的诊断通信系统来形成一套较为独立的诊断网络,ISO9141和ISO14230就是这类技术上较为成熟的诊断标准。而ISO15765适用于将车用诊断系统在CAN总线上加以实现的场合,从而适应了现代汽车网络总线系统的发展趋势。ISO15765的网络服务符合基于CAN的车用网络系统的要求,是遵照ISO14230-3及ISO15031-5中有关诊断服务的内容来制定的,因此,ISO15765对于ISO14230应用层的服务和参数完全兼容,但并不限于只用在这些国际标准所规定的场合,因而有广泛的应用前景。
诊断协议标准使用情况:
| 协议标准 | 用户 | 备注 |
| ISO9141 | 欧洲 | 满足OBD-III |
| ISO14230 | 欧洲 | 又称KeywordProtocol2000;满足OBD-II |
| J1850 | GM、Ford、DC | 满足OBD-II |
| J2480 | GM、Ford、DC | 基于CAN;满足OBD-IIII |
| ISO15765 | 欧洲 | 基于CAN;满足E-OBD |
5、多媒体信息系统总线标准
汽车信息娱乐和远程信息设备,特别是汽车导航系统,需要功能强大的操作系统和连接能力。目前主要应用的几种总线协议如下表所列。多媒体信息系统总线使用情况
(1)MOST网络
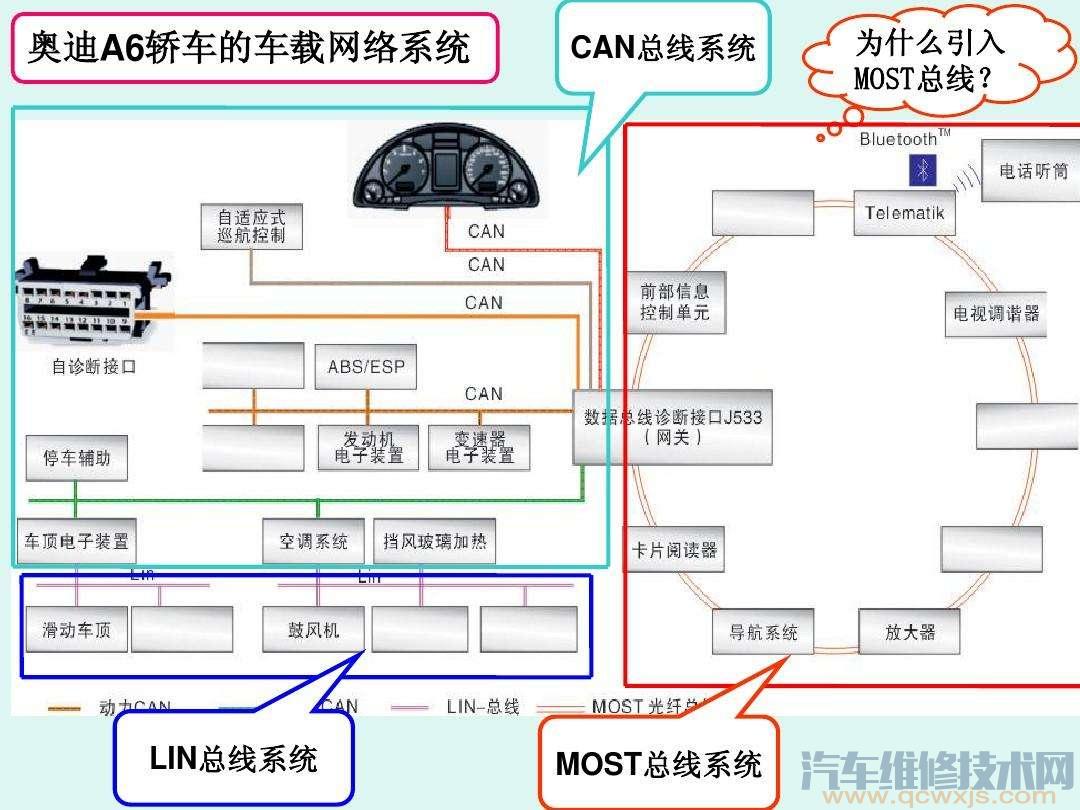
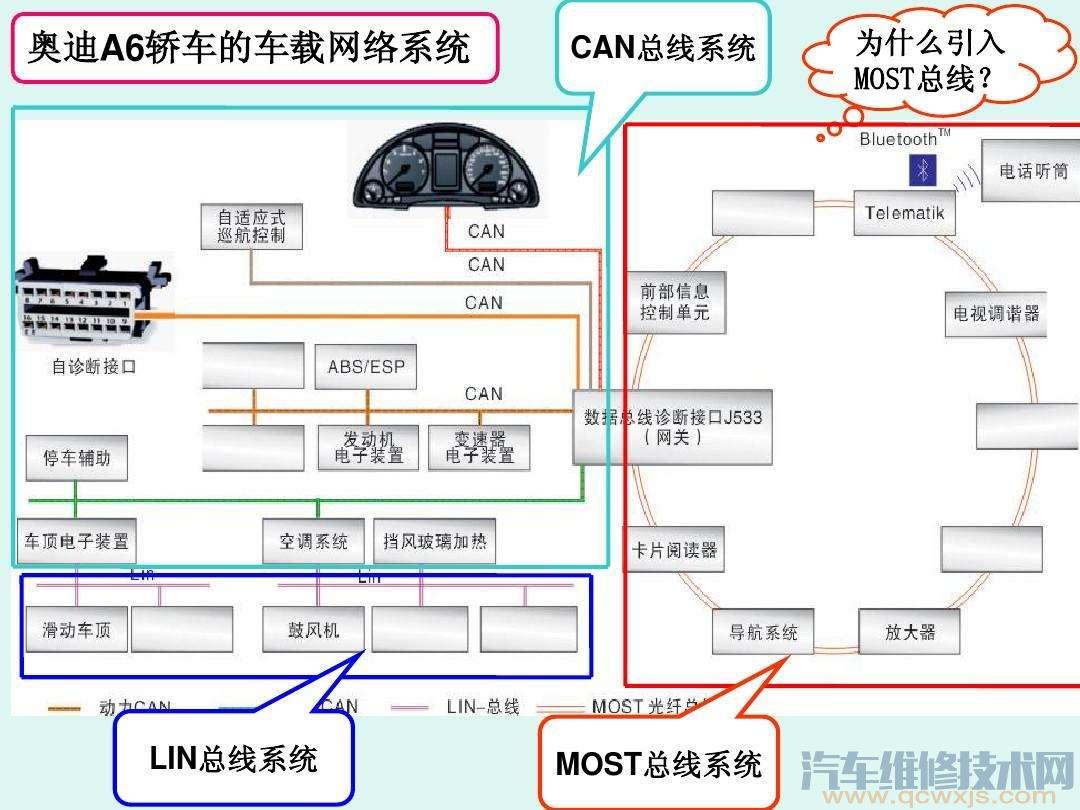
MOST网络是由德国Oasis Silicon System公司开发的。MOST技术针对塑料光纤媒体而优化,采用环行拓扑机构,在器件层提供高度可靠性和可扩展性。它可以传送同步数据(音频信号、视频信号等流动型数据)、非同步数据(访问网络及访问数据库等的数据包)和控制数据(控制报文及控制整个网络的数据)。MOST得到包括BMW、Daimler Chrysler、Harman/Becker和Oasis公司的支持,已应用在多款车型上,如BMW7系列、Audi A-8、Mercedes E系列等。
(2)Blue tooth
随着蓝牙技术的发展,短距点对点通讯的蓝牙技术在汽车中寻求到了发展空间,其相对低廉的成本和简便的使用方法得到汽车业界的认同。蓝牙无线技术是一种用于移动设备和WAN/LAN接入点的低成本、低功耗的短距离射频技术。蓝牙标准描述了手机、计算机和PDA如何方便地实现彼此之间的互连,以及与家庭和商业电话和计算机设备的互连。蓝牙特殊兴趣组的成员包括AMIC、BMW、Daimler Chrysler、Ford、GM、Toyota和Volkswagen。
移动电话与车内媒体之间的信息交互成为蓝牙技术进入汽车的突破点,Johnson Controls公司的免提手机系统“Blue Connect”,允许司机在双手扶住方向盘的情况下,通过支持蓝牙功能的手机保持联系。Daimler-Chrysler推出Uconnect蓝牙免提电话系统中,蓝牙成为移动电话与车内媒体之间进行信息交互的手段,驾驶员通过安装在挡风玻璃上的麦克风和车内音响系统的扬声器与他人通话,将驾驶员的双手从橾作移动电话中解脱出来,从而保证了行车安全。
(3)ZigBee无线网络
ZigBee无线网络在汽车上应用的解决方案是针对蓝牙技术受车内电磁噪声影响的问题而提出。ZigBee可以工作在低于1GHz与2.45GHz的频带范围,传输速率为250kbps,主要应用范围包括工业控制、家庭自动化、消费类应用以及潜在的汽车应用。目前,ZigBee联盟发布了首批成功完成互操作性测试的四款平台。这些平台将用来测试未来数月内推出的ZigBee产品,为ZigBee在各领域的实际应用铺平道路。
6. 安全总线标准 (E类总线)
安全总线主要用于安全气囊系统,以连接速度计、安全传感器等装置,为被动安全提供保障。目前已有一些公司研制了相关的总线和协议,包括Delphi公司的SafetyBus和BMW公司的Byteflight。
Byteflight协议特点
Byteflight协议是由BMW、Motorola、Elmos、Infineon等公司共同开发的,试图用于安全保障系统。此协议基于灵活的时分多路TDMA协议、以10Mbps的速率传送数据,光纤可长达43m。其结构能够保证以一段固定的等待时间专门用于来自安全元件的高优先级信息,而允许低优先级信息使用其余的时段。这种决定性的措施对安全是至关重要的。
Byteflight不仅可用于安全气囊系统的网络通信,还可用于X-by-Wire系统的通信和控制。BMW公司在其2001年9月推出的BMW 7系列车型中,采用了一套名为ISIS的安全气囊控制系统,它是由14 个传感器构成的网络,利用Byteflight来连接和收集前座保护气囊、后座保护气囊以及膝部保护气囊等安全装置的信号。在紧急情况下,中央电脑能够更快、更准确地决定不同位置的安全气囊的施放范围与时机,发挥最佳的保护效果。
车载各类总线应用趋势图
| 类型 | 事实上的标准 |
| A类 | LIN |
| B类 | CAN |
| C类 | 高速CAN,FlexRay |
| D类:多媒体总线 | MOST(主)Bluetooth(辅) |
| 诊断总线 | OBD II |
| E类:安全总线 | Byteflight |
- 前文: 四缸发动机点火顺序(图)
- 后文: 汽车车载网络技术的特点和发展趋向