电子控制主动式油气弹簧悬架系统构造和工作原理
悬架
11-06
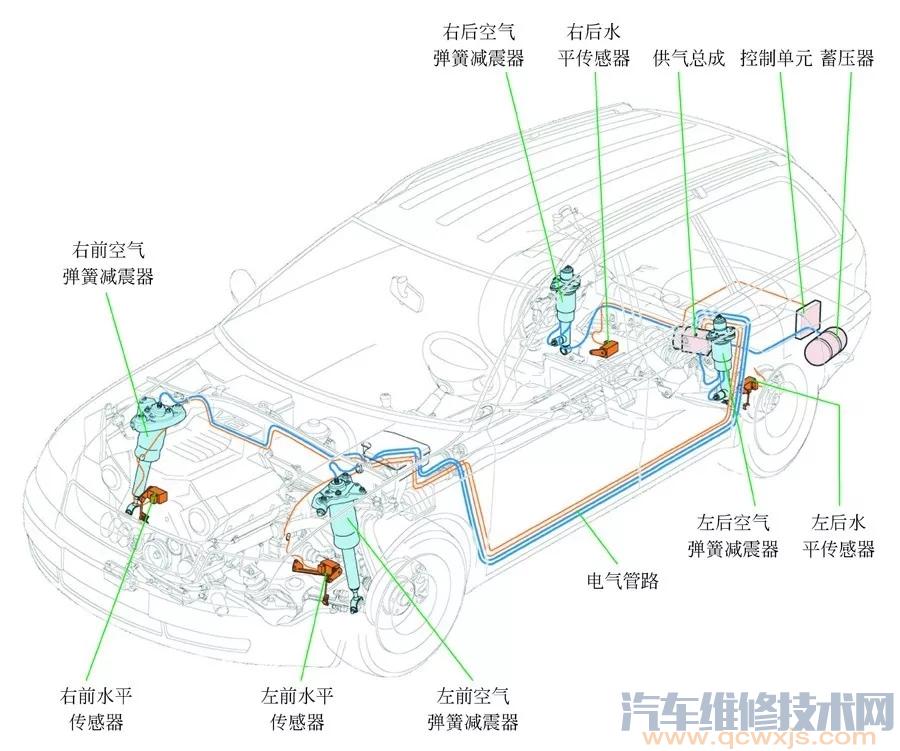
下面以丰田索阿拉高级汽车采用的电子控制主动式空气悬架系统为例进行介绍电子控制主动式空气悬架系统。
电子控制主动式空气悬架系统主要由空气压缩机、干燥器、空气电磁阀、车身高度传 感器、带有减振器的空气弹簧、悬架控制执行器、悬架控制选择开关及电控单元等组成。 空气压缩机由直流电动机驱动,形成压缩空气,压缩空气经干燥器干燥后由空气管道经空气电磁阀送至空气弹簧的主气室。
下面介绍几个主要传感器和执行器。
车身高度传感器是把汽车悬架装置的位移量转换成电信号,输送给控制单元。车身 高度传感器为光电式,其结构如图1 0.27所示。在传感器内部,有一个靠连杆带动旋转 的轴,在轴上装有一个开有许多槽的遮光板,遮光板的两侧装有4组光电耦合元件。当 连杆带动轴旋转时,光电耦合元件之间或者被遮光板遮上,或者两者元件之间透光,因 此光电耦合元件把这种变化转换成电信号,并输人到控制单元中,如图1 0.28所示。利 用这4组光电耦合元件导通与截止的组合,就可以把车身高度的变化分为1 6个区域进 行检测。
控制单元根据车身高度传感器输人的信号,控制压缩机及S卩气阀,以此增加或减少 悬架主气室内的空气量,从而保持车身高度。因为减振器在行车过程中总是振动的,很 难判定当时车身所处的区域,所以计算机每隔数十毫秒就检测一次车身高度传感器输出 的信号,并对一定时间各信号所占区域的百分比作出计算,以此来判断车身实际所处的区域。拉紧螺栓的上端与传感器的连杆铰连,下端与后悬架臂相连。当车身上下振动时,拉 紧螺栓带动连杆使传感器的轴左右旋转,光电耦合元件则把旋转信号转换成车高信号输 出。拆下拉紧螺栓,拧松拉紧螺栓的锁紧螺母,旋转拉紧螺栓的螺旋接头可以改变拉紧螺 栓的长度,从而调整车身高度的设定值。
2) 转角传感器该转角传感器为光电式,安装在转向轴上,用来检测转向轴的回转方向、回转速 度。如图10.29所示为转角传感器的安装位置和构造。电控单元根据两遮光器输出端 通、断变换的速度,即可检测出转向轴的回转速度。同时由于两遮光器通、断变换的 相位错开90°,因此可通过判断哪个遮光器首先变为ON状态检测出转向轴的回转方向 。
主、辅助气室之间的气阀体上有大小两个通路。悬 架控制执行器带动气阀体控制杆转动,使阀芯转过一个 角度,改变通路的大小,就可以改变主、辅助气室之间 的气体流量,使悬架刚度发生变化。
悬架的刚度可以在低、中、高3种状态下变化。阀 芯的开口转到使气体流量大的通路被打开的位置,主气 室的气体经阀芯的中间?L、阀体的侧面孔通道与辅助气 室的气体相通,两气室之间的流量大,相当于参与工作 的气体容积增大,悬架刚度处于低状态。阀的转气体流量小的通路被打 的 置,气体通路的小气体通路被打 , 两气室的气体流量小,悬架刚度处于中状态。
阀芯的开口转到使两气室之间的气体通路全部被封 住,两气室间的气体不能相互流动,可压缩的气体容积 减小。悬架在振动过程中,只有主气室的气体单独承担缓冲的任务,所以悬架的刚度处于高状态。
4)悬架控制执行器
悬架控制执行器除驱动主、辅气室的阀芯进行刚度调节外,还要控制减振器的回转阀进行阻尼调节。为了适应频繁变化的工 况,并保证精确的定位,驱动动力采用 了直流步进电动机。悬架控制执行器的 基本结构如图1 0.31所示。
抗侧倾:
由装于转向轴的光电式转向传感器检测转向盘的操作状况。在急转弯时,电 控单元通过执行器使弹簧刚度和减振器阻尼力转换到高值,以抵抗车身侧倾。
抗“点头”:
在车速高于60km/h时紧急制动,电控单元通过执行器使弹簧刚度和减 振器阻尼力调到高值,而不管驾驶员选择了何种控制状态,以抵抗车身前部的下俯。
高速感应:
当车速大于110km/h时,系统将使弹簧刚度和减振器阻尼力调至中间值! 从而提高高速行驶时的操纵稳定性。既使驾驶员选择了常规值自动控制状态,也就是刚度 和阻尼处于低、软值时,系统也将刚度和阻尼力调至中间值。
前、后关联控制:
车速在30!80km/h范围内时,若前轮车高传感器检测出路面有小 凸起,则在后轮越过该凸起之前,系统将使弹簧刚度和减振器阻尼力调至低值,从而提高 汽车乘坐舒适性。此时既使驾驶员选择了 “高速行驶时自动控制”状态,刚度和阻尼力为 中间值,系统仍将刚度和阻尼力调至低值。为了不影响高速时的操纵稳定性,这种动作在 车速为80km/h以下才发生。
坏路、俯仰、振动感应:
车速在40!100km/h范围内,当前轮车高传感器检测出路 面有较大凸起时,系统将弹簧刚度和减振器阻尼力调至中间值,以抑制车体的前后颠簸、 振动等大动作,从而提高汽车的乘坐舒适性和通过性。而不管驾驶员选择了何种控制状 态。车速高于100km/h时,系统将使刚度和阻尼力调至高值。
良好路面正常行驶:
弹簧刚度和减振器阻尼力由驾驶员选择,“常规值自动控制” 状态,刚度和阻尼力处于低值)“高速行驶时自动控制”状态,刚度和阻尼力为中。
2) 车身高度控制车身需要升高时,电控单元控制电磁阀使压缩空气进人空气弹簧的主气室,如 图10. 32(a)所示,使空气弹簧伸长,车身升高)当车身需要降低时,电控单元控制电磁阀 使空气弹簧主气室中压缩空气排到大气中去,如图10. 32(b)所示,空气弹簧压缩,车身降低。在空气弹簧的主、辅助气室之间有一连通阀,空气弹簧的上部装有悬架控制执行器。 电控单元根据各传感器输出信号,控制悬架执行器,一方面使空气弹簧主、辅助气室之间 的连通阀发生改变,使主、辅气室之间的气体流量发生变化,因此而改变悬架的弹簧刚 度;另一方面,执行器驱动减振器的阻尼力调节杆,使减振器的阻尼力也得以改变。
高速感应:
当车速高于90km/h时,将车身高度降低一级,以减小风阻,提高行驶稳 定性。如果驾驶员选择了常规值自动控制状态,则车身高度值由中间值调至低值;如果驾 驶员选择了高值自动控制状态,则车高由高值调至中间值。当车速为60km/h时,车高恢
状。连续坏路面感应:
汽车在坏路面上连续行驶,车高信号持续2. 5s以上有较大变动, 且超过规定值时,将车高升高一级,使来自路面的突然抬起感减弱,并提高汽车的通过 性。
连续坏路且车速大于40km/h小于90km/h时,不论驾驶员选择了何种控制状态,都 要将车高调至高值,以减小路面不平感,确保足够的离地间隙,提高乘坐舒适性。(汽车维修技朮wang www.QcwxJs.com 原创 )