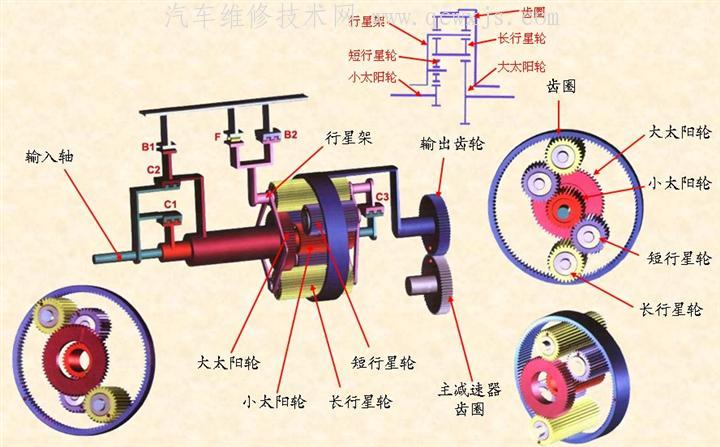
这是一种十分著名的行星齿轮机构,以设计发明者H.W.Simpson工程师命名的机构,从20世纪4O年代至今广泛采用于世界各国的汽车自动变速器中,它的特点是由两个完全相同的齿轮参数的行星排组成,见图9.14。整个机构具有相同齿圈,六个相同的行星轮和一个供两个行星排合用的加长太阳轮(故又称共同太阳轮行星齿轮机构),它的前行星架和后齿圈为同一构件,并且和输出轴连接。该机构可组成三个前进档和一个倒档。
1.各执行元件的功能
辛普森行星齿轮机构设置了五个变速执行元件:C1前多片离合器,C2后多片离合器、B1微动带,B2后制动带、F1
单向离合器。五个
变速执行元件的作用效果如下(见图9.15)。
①当C1前多片离合器作用时,把来自涡轮输出轴的动力接通至太阳轮。
②当C2后多片离合作用时,把来自涡轮输出轴的动力接通至前排赤圈。
③当B1前制动带作用时,固定太阳轮。
④当B2后制动带作用时,固定后行星架。
⑤当F1单向离合器作用时,固定后行星架。
在辛普森机构中的B1和B2实际上是一种制动器,在某些变速器中该制动器采用制动带,而在有些变速器中则采用多片离合器作为制动器,例如日本丰田的自动变速器。
表9.3反映了辛普森行星齿轮机构变速器变速执行元件的工作规律。
2.动力流分析
下面进行辛普森
机构各档位的动力流分析。
l)l档
把预选杆置于D
位置,C2后多片离合器作用把输入动力传给前齿圈,F1单向离合器作用,使后行星架固定不动。由于后排行星架被FI单向离合器固定,因此后排行星齿轮机构具有确定传动比,且是
减速机构,另外后排行星齿轮机构通过后齿圈输出,它的输出转速和转动方向应该和前行星架保持一致,因为前行星架和后齿圈为同一构件。根据这两个条件,就可以确定前行星架和太阳轮之间的转速分配,显然太阳轮的转速比前行星架快得多。
太阳轮逆时针的旋转带动后行星轮顺时针转动,行星轮再带动后齿圈顺时针转动,由于后齿圈顺时针转动时,会给后行星架施加一个逆时针的力矩,通过F1单向离合器将后行星架固定。后排行星齿轮机构的传动比是后齿圈和太阳轮齿数之比,但
辛普森机构1档传动比要大得多,计算也更复杂且有确定的
传动比。
辛普森机构的1档具有汽车滑行
(机动车行驶时,把离合器分开或用空挡使传动装置脱离发动机,靠惯性前进。)
功能,当驱动轮的
转速超过了
发动机的转速之后,来自驱动轮的逆向动力通过后齿圈和前行星架输入机构,使后行星架顺时针旋转,脱离F1单向离合器锁止,实现了汽车滑行。当驱动轮转速低于发动机时,单向离合器重新锁止,变速器恢复驱动状态。
若要在1档实现发动机制动,则需要把预选杆置于L或1位置,此时后行星架被B2后制动带固定,驱动轮逆向传入的动力通过变速器将
发动机转速提高,从而消耗动力使驱动轮转速迅速下降,实现发动机制动。
2)2档
C2后多片离合器和B1前制动带同时作用。此时涡轮输出轴经C2后多片离合器和前齿圈连接,同时太阳轮组件被B2后制动带固定。
其动力经输入轴传给前齿圈,使之作顺时针旋转,由于太阳轮被固定,因此前行星轮在前齿圈带动下,既有自转,又随行星架公转,行星轮和行星架都是顺时针转动,行星架最后带动输出轴顺时针旋转。2档传动比取决于行星架当量齿数和前齿圈齿数之比,它是一种传动比大于1的减速运动。2档的传动比仅仅和前排行星齿轮机构有关。
另外当输出轴转动时,同时会带动后齿圈顺时针转动,后太阳轮已被固定,此时后行星轮和后行星架都顺时针空转F1 单向离合器处于释放状态。
在上述的辛普森机构的2档工作状态下(预选杆置于D位),来自
驱动轮的逆向传入变速器的动力,可以直接传至发动机,实现发动机制动。
3)3档
C1前多片离合器和C2后多片离合器同时作用。C1前多片离合器的接合把动力传至太阳轮,C2后多片离合器的接合把动力传至前齿圈。根据上述行星齿轮机构特征:任意两元件同速同方向旋转即为直接档,则机构锁成一整体。在3档状态,前齿圈和太阳轮均有相同旋转方向和速度。从另外角度分析,当来自C2后多片离合器的动力传至前齿圈,再由前齿圈带动太阳轮逆时针转动,而来自C1前多片离合器的动力直接传给太阳轮,使之顺时针转动,因此同一个太阳轮不可能出现两个转动方向,只能相互间锁止成一整体。当机构整体顺时针转动时,n单向离合器和后行星架处于释放状态。3档是直接档,它的传动比是1:1。
在3档状态下,只存在发动机制动的功能,而不存在汽车滑行的作用。
4)倒档
C1前多片离合器和B2后制动带同时作用。C1前多片离合器的接合把动力传给太阳轮,B2后制动带的作用使后行星架固定。此时动力经输R入轴传给了太阳轮并使其顺时针转动,因后行星架已被固定,后行星轮成了过渡轮,因此后行星轮是逆时针转动,井使后齿圈也逆时针转动,最终后齿圈带动输出轴逆时针旋转。倒档传动比等于后齿圈齿数和太阳轮齿数之比,是传动比大于1的减速运动。从上述可知,倒档的传动比仅仅和后排行星齿轮机构相关。